( ESNUG 581 Item 2 ) ---------------------------------------------- [03/23/18]
Subject: User kickstarts InFact PSS by using *only* System Verilog as input
In contrast, InFact's killer graph-based constraint solver means I do
NOT have to guide/assist the System Verilog constraint solver. I only
set out objectives (goals) of what I want to solve -- and InFact does
the graph or derivation of the path to get there, as well as manages
all the dependencies and redundancies.
After we adopted InFact, we no longer do extra constraint guidance.
In my next section I will cover Mentor InFact modeling, libraries, and
detail how their hierarchical graph-based works.
- [ Light Bulb Man ]
User on why MENT InFact leads graph-based PSS
From: [ Light Bulb Man ]
Hi John,
Here's my part 2.
FUNCTIONAL MODELING FOR INFACT
It's actually constraining when people talk about modeling in InFact. It's
where I enter in my functional, or application-specific constraints. For
example, the tool needs to know that I'm trying to send an packet to the
cloud that conforms to our internal cloud standard; otherwise, if I don't
form the packet correctly, they consider it an attack and they will drop
the packet.
To constrain that, I put in a header with a particular encapsulation
hierarchy; it has a special signature, length, and must come in at the right
order in a stream of packets, so on and so forth.
That is the extent to which I set my modeling constraints. InFact then
derives the logical relationships/dependencies between the different
variables that I use in my stimulus and infers the correct order ... and
when to solve which one. We don't need to figure those out. InFact
does it for you.
---- ---- ---- ---- ---- ---- ----
INFACT STANDARD PROTOCAL LIBRARIES
Mentor has InFact libraries that come with standard checks to see if your
signals are valid. For example, when you say that your device "supports
USB" you know that anything that has a correct USB connector hooked to it
will work. To do that, you must get back the signal at the right time,
at the right level, etc. -- those are called protocol-level checks.
(click on pic to enlarge image)
|
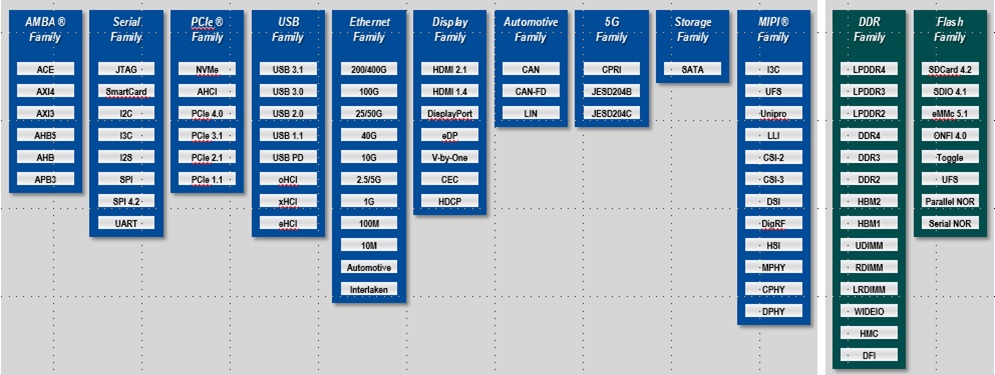
I use these prequalified libraries for all the standard protocols in my
chip, e.g. Ethernet (40 Gigabit, 100 Gigabit), PCIe, and the DDR memory.
These libraries definitely save me time. I know there's something like
100 of them, but I don't know the exact list off hand.
I also develop my own private libraries for our internal protocols.
---- ---- ---- ---- ---- ---- ----
THE INFACT SYSTEM VERILOG IMPORTER
Mentor has it's own proprietary graph-based language to drive InFact and
other related tools. I know the language now, but that was a negative
when we first started. I told my Mentor AE,
"If you ask a software engineer to learn a new language, it's fine.
However, most verification engineers have a hardware background,
and learning a new language is a headache for them."
That was 3 years ago. Mentor's response was create an InFact System
Verilog Importer that automatically generates the equivalent of their
in-house graph language from our existing System Verilog constraints
and coverage goals.
The first time I used their System Verilog importer, I wrote all my
constraints in System Verilog, and literally pressed a button and it
automatically converted it into the InFact graph-based language. That
was it. It was a one-to-one correlation for our use case.
It worked for then, but I was worried about future chips where messy
constraints would confuse this importer.
But as I got more comfortable, I found from tinkering with the importer
output that I was learning the MENT Graph language. Over time, I would
bypass the auto-translate and go in and tweak a few things.
And of course, once you're willing to go under the hood, you can gain a
lot more control.
This initial automated translation was key to helping new users ease their
learning curve. Our engineers didn't have to learn all the language up
front to realize the tool's benefit. Their importer solved our chicken-
and-egg-learning-curve situation, by giving us the benefits of graph tools
early on.
---- ---- ---- ---- ---- ---- ----
INFACT GRAPHS & HIERARCHY
The very first thing we do in any engineering problem is to divide and
conquer. No one would design an entire system in one single monolithic
entity, not for a schematic, or a graph, or even program or procedure. We
always break it up and make it hierarchical.
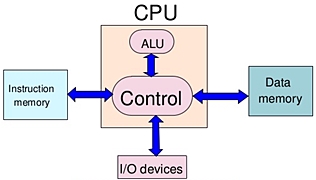
If you model a CPU, one simple way to break it up could be just the ALU and
the instruction decode and other control units. You put in the basic
instruction stream, look at the code, and then dispatch commands to all the
different units inside of the CPU to perform their tasks in a timely manner,
and in the right order. You break those things up and then adhere to some
kind or protocol in between the units so that they can communicate to each
other correctly.
(click on pic to enlarge image)
|
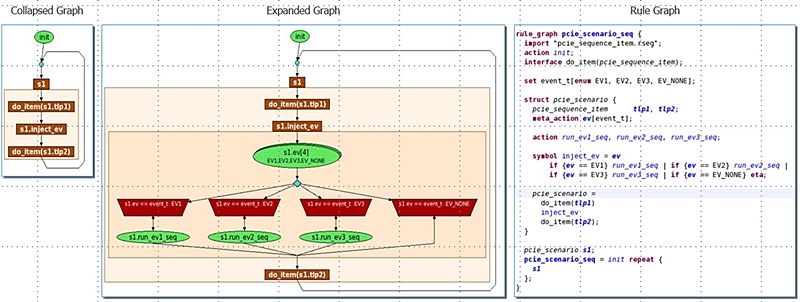
InFact's graph mode fully supports hierarchy. Each node can be a simple
node or another graph -- i.e. you can have a graph inside a graph. You can
decompose or construct the entire system from simple subcomponents. If you
partition your system at the right level, it would be a one-to-one mapping
between what you show graphically, and what you enter on the code.
Once you know the tool, it is easier to work in graph mode than just textual
code.
- The graph can illustrate concurrent/parallel relationships more
clearly, than if you were to read straight code. People tend to be
visual. If I show you a graph with pointer looping back to itself,
you can immediately identify that this particular code got repeated
multiple time.
- With software code, you have a concept of a flow chart. But when
you read code, if I start by giving you the exact syntax of
System Verilog code "for(int i=0; i<10; i++) begin ... end" so on
and so forth -- it's hard to spot errors, intent, and simply what
is going on. Graphs don't have that problem.
A graph is just a connection from point to point. A computer can process a
graph with millions of nodes; for us, even when we build a chip, if you call
each of the gates on the chip a node, and the wire that hooks them up as the
edge, the chip layout is essentially one very large graph.
But if you ever look at a chip layout it's so dense it looks like just a
big blob of black. In the same way, if you try to reconstruct a graph
with even 100 nodes it's incomprehensible, if its densely populated.
The first thing I asked Mentor about InFact was how they dealt with these
kinds of massive connections. They mentioned their hierarchical approach.
I can collapse the 5 or 10 nodes that represents (for example) my CPU
instruction decoder; then call that instruction decode graph and collapse
them, then at a higher level see the interactions between my instruction
decoder and ALU.
With InFact's graph-based approach:
- They can derive the global scheme from the graph.
- They treat each of the graph nodes as a compute entity.
- When you drill down to a particular graph node, inside of that
node, you can enter/execute any code you want, i.e. each compute
node can act like its own procedure.
They organize it to make it more manageable for a human designer.
In my last section I'll discuss how you define your test intent with InFact
so your coverage space doesn't explode, along with debug and coverage.
(See ESNUG 581 #3.)
- [ Light Bulb Man ]
---- ---- ---- ---- ---- ---- ----
Related Articles
Mentor InFact PSS user convinces boss, cuts project time in half
User kickstarts InFact PSS by using *only* System Verilog as input
User reports InFact PSS prunes coverage space for 30X sim speed-up
Cooley schooled by user on why MENT InFact leads graph-based PSS
Mentor InFact was pretty much an early No Show in the PSS tool wars
Join
Index
Next->Item
|
|